
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
 Home > Product Center > Planetary Joint Module > LZ5710 Lightweight Low-Load Planetary Joint Module
Home > Product Center > Planetary Joint Module > LZ5710 Lightweight Low-Load Planetary Joint Module
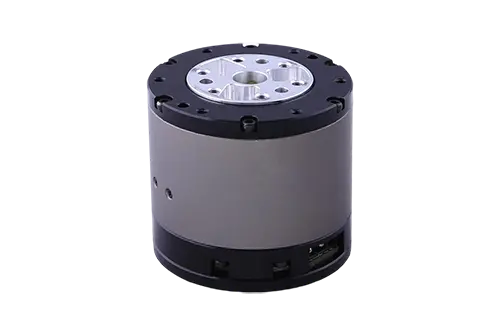
LZ5710 Lightweight Low-Load Planetary Joint Module
Weight: 1420g±20g
Number of Poles: 42 poles
Number of Phases: 3 phases
Drive Method: FOC (Field-Oriented Control)
Reduction Ratio: 10:1
Full Hardware FOC Technology, Chip-Level FPGA Development
Hollow Cabling
Triple-Loop Control with All Frequencies at 20KHz for Fast Response
etherCat/canOpen Bus
16-bit ADC with 1MHz Sampling Rate
Power-Off Brake
The core technology of the product lies in the harmonic integrated joint module, featuring a drive-control integrated design. The inner rotor structure enables hollow cabling, while diversified model options including 11, 14, 17, 20, 25, 32 and 40 series ensure flexible applications. With a compact and miniaturized profile and low power consumption, it adopts a pin-type brake mechanism that triggers mechanical locking instantly upon power loss, with an action time of less than 10ms.
The dual steel wheel design, integrating cross-roller bearings with steel wheels, reduces axial space occupation. By meshing two steel wheels with one flexspline, it mitigates stress from flexspline deformation, achieving smooth operation, high efficiency and positioning accuracy up to 20 arcseconds.
Ultra-Compact, Lightweight Design
Dimensions: Diameter Ø57mm × Height 46mm, weighing only 300g—this is a compact joint module.
Non-hollow structure, with a simpler design and lower cost, suitable for end joints that don't require wiring.
Mature Drive and Communication Solutions
Drive Mode: FOC field-oriented control, with triple-loop control for torque, speed, and position—ideal for high-precision joint control.
Communication: CAN/CAN FD interface, compatible with mainstream robot controllers, simple wiring, and strong anti-interference capability.
Dual magnetic encoder configuration: magnetic encoder + dual encoder, supporting dual closed-loop control on both the motor side and the output side to enhance positioning accuracy.
Reliability and Environmental Adaptability
Temperature range: -20~60°C, covering typical operating conditions from indoor to semi-outdoor environments.
Noise: ≤55 dB(A); low-noise design, ideal for human-robot collaboration scenarios.
Insulation Class: Class B, ensuring long-term operational reliability.
Bearing Type: Deep-groove ball bearing, simple structure, low maintenance cost.
This LZ5710N is a lightweight, low-power, plug-and-play joint module designed for light-load applications. Its key advantages include: a rated torque of 3 Nm, a low backlash of just 7 arcminutes, FOC-driven control, CAN communication, and dual magnetic encoders. It's ideally suited as an end-effector, wrist, or ankle joint for exoskeletons or collaborative robots, and is also perfect for the rapid development of small educational and research robots.
| Model | LZ4610N Non-hollow | LZ4605N Non-hollow | LZ5710N Non-hollow | LZ5740N Non-hollow | LZ5736N Non-hollow | LZ807.75N Non-hollow | LZ8025CN Non-hollow | LZ10028CH Hollow-shaft | LZ12028CH Hollow-shaft |
|---|---|---|---|---|---|---|---|---|---|
| Reducer Type | Planetary | Planetary | Planetary | Planetary | Planetary | Planetary | Planetary | Planetary | Planetary |
| Drive&Control Method | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Dimensions Diameter × Height (mm) | Φ46×38 | Φ46×38 | Φ57×46 | Φ57×60 | Φ57×70 | Φ80×47 | Φ80×60.5 | Φ100×68 | Φ120×80 |
| Gear Ratio | 10 | 5 | 10 | 40 | 36 | 7.75 | 25 | 28 | 28 |
| Rated Torque (N・m) | 0.85Nm | 0.4Nm | 3.4Nm | 12Nm | 29Nm | 7.75Nm | 27Nm | 67.5Nm | 126Nm |
| peak torque (N・m) | 2.55Nm | 1.2Nm | 10.2Nm | 36Nm | 80Nm | 23.2Nm | 81Nm | 200Nm | 378Nm |
| Magnetic Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder | Dual Encoder |
| rated power (W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570 |
| Rated Voltage (V) | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V |
| Communication Mode | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CANFD/Ether CAT | CANFD/Ether CAT |
| Operating Temperature Range (°C) | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~70°C | -20~70°C | -20~80°C | -20~80°C |
| Insulation Class | Class B | Class B | Class B | Class B | Class B | Class B | Class B | Class B | Class B |
| No-load Speed (rpm) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| Rated Speed (rpm) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| Rated Current (Apk) | 1.3 | 4.5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41.6 |
| Peak Current (Apk) | 3.8 | 13.5 | 9 | 9 | 16 | 20.8 | 30 | 66 | 83.2 |
| Backlash (arcmin) | ≤7arcmin | ≤7arcmin | ≤7arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin |
| Back-EMF Constant | 1.54V/krpm | 1.54V/krpm | 7.1V/krpm | 7.1V/krpm | 7.52V/krpm | 0.1528Vs/Rad | 7.45Vrms/krpm | 9Vrms/krpm | 8V/krpm |
| Torque Constant | 0.025Nm/A | 0.025Nm/A | 0.1Nm/A | 0.1Nm/A | 0.124Nm/A | 0.09143Nm/A | 0.15Nm/A | 0.15Nm/A | 0.12Nm/A |
| Stage Count | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| Coil Connection | Star connection | Star connection | Star connection | Star connection | Star connection | Star connection | Star connection | Delta Connection | Delta Connection |
| Bearing type | Ball Bearing | Ball Bearing | Ball Bearing | Ball Bearing | Ball Bearing | Cross roller bearings | Cross roller bearings | Cross roller bearings | Cross roller bearings |
| Working Noise (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| Weight (g) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| Phases Number | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

